.png)
Radiation Detection and Assistant Robot
Project Overview
This undergraduate research project focused on developing a remote radiation monitoring rover. It utilizes a Geiger–Muller (GM) counter for radiation detection and incorporates several advanced features for efficient and safe operation in potentially hazardous environments.
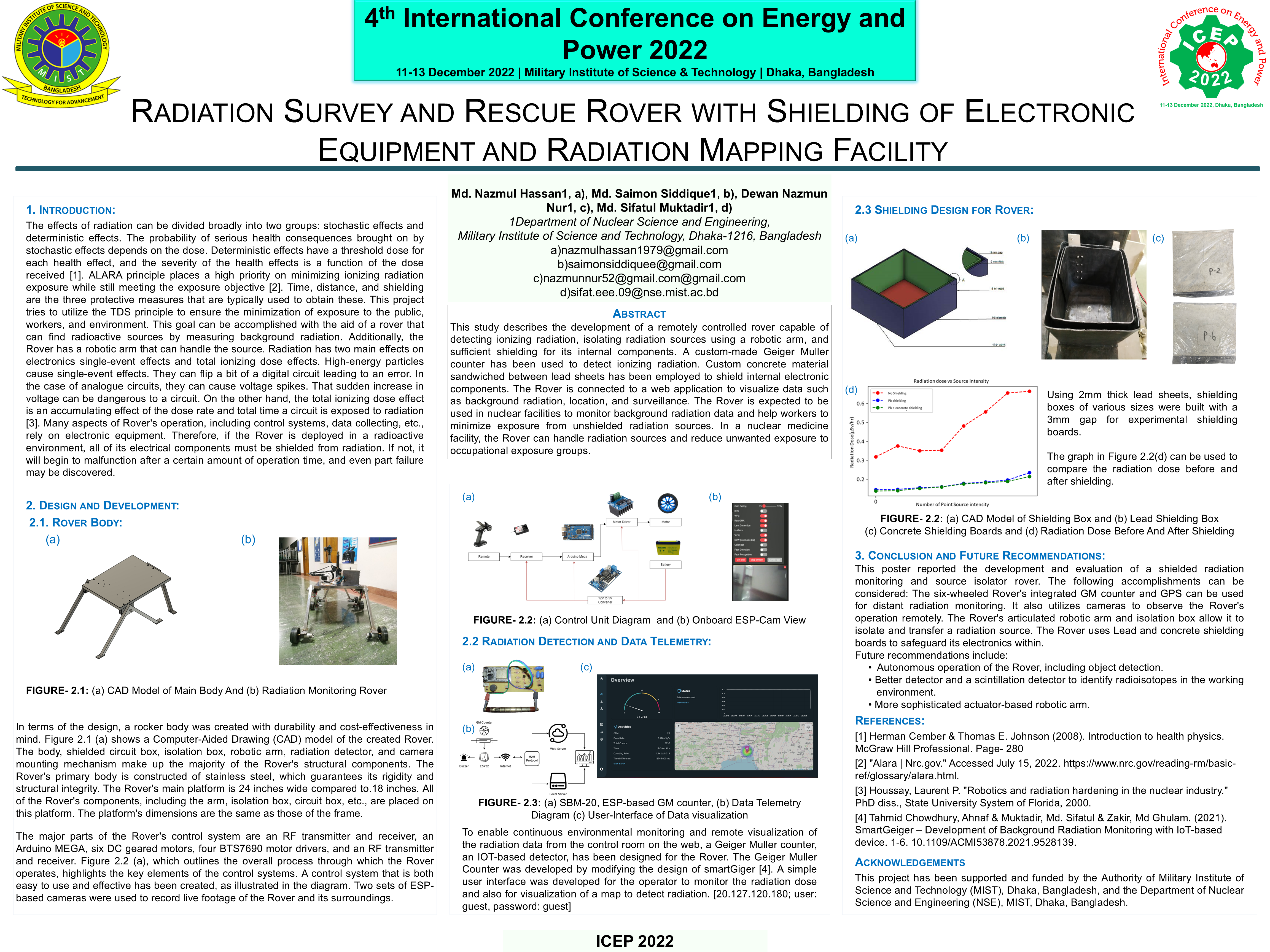
Poster Presented at ICEP 2022

Fully constructed Rover

Fully constructed Rover
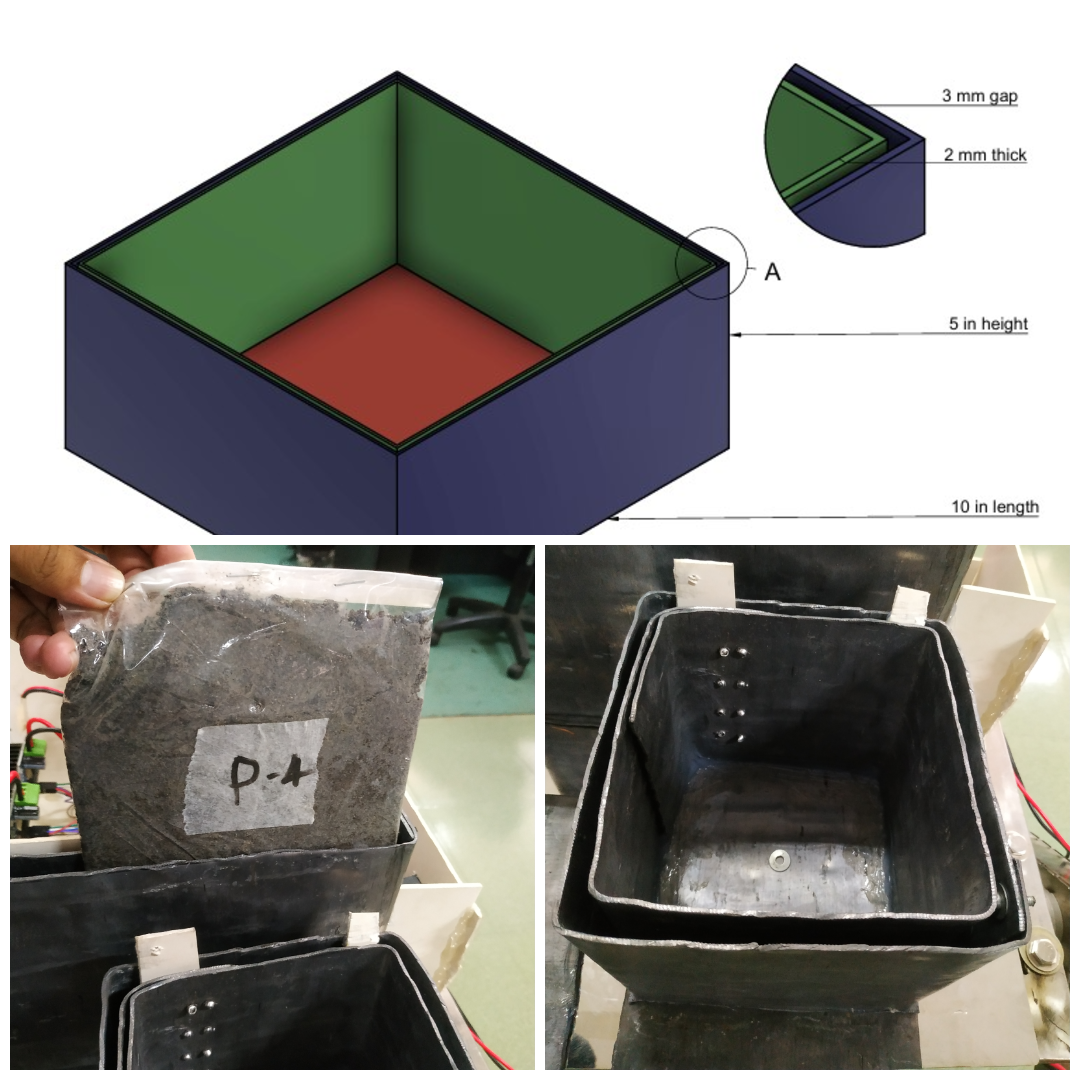
Concrete composite board placement for radiation shielding
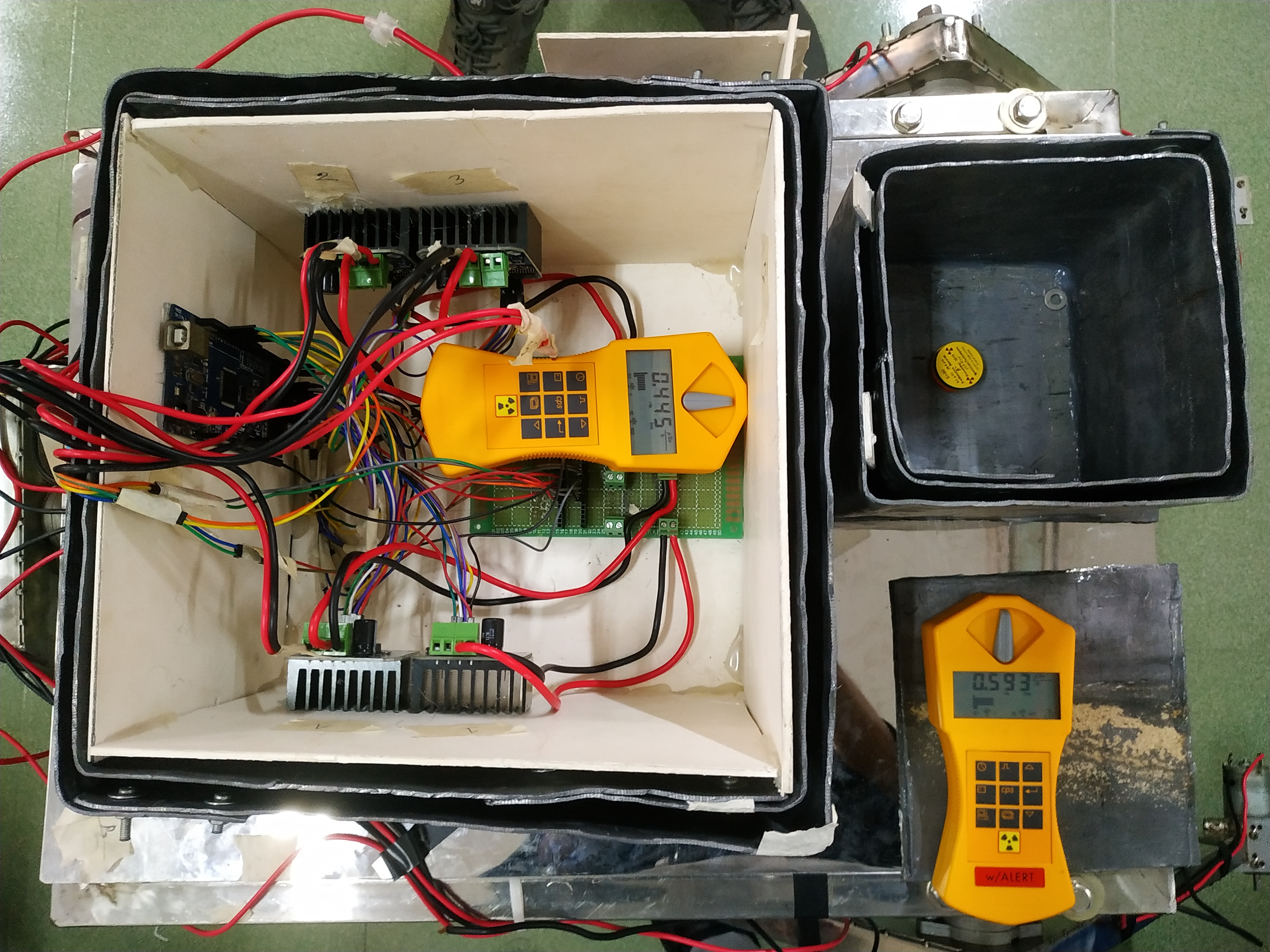
Measuring the dose from point sources inside and outsite the control equipment

Rover and shielding construction
Supervisor

Md. Sifatul Muktadir
Assistant Professor
Department of Nuclear Science and Engineering
Military Institute of Science and Technology (MIST), Dhaka
sifat.eee.09@nse.mist.ac.bd
LinkedInKey Features
- Six-wheeled rover design for stability and maneuverability
- Custom-made Geiger–Muller (GM) counter for radiation detection
- GPS-based location tracking for precise mapping of radiation hotspots
- Real-time data telemetry for instant radiation level monitoring
- Web application for data visualization and radiation mapping
- Articulated robotic arm for handling radiation sources
- Lead and concrete shielding for protection of electronic components
- Integrated radiation source storage compartment
- Remote control capabilities for operation in high-risk areas
Research Methodology
- Design and 3D modeling of the rover chassis using CAD software
- Development of a custom Geiger–Muller counter based on the smartGeiger design
- Integration of GPS tracking and data transmission systems
- Implementation of remote control interface using RF technology
- Design and fabrication of radiation shielding using lead sheets and custom concrete mixtures
- Development of a web application for data visualization and radiation mapping
- Testing and calibration in controlled radiation environments
Achievements
- Research published in the International Journal of Nuclear Security (IJNS)
- Presented at the 4th International Conference on Energy and Power (ICEP-22)
- Abstract published in the ICEP-22 Book of Abstracts
- Won 1st prize in the poster presentation competition at ICEP-22
Results and Impact
The developed rover demonstrated high accuracy in radiation detection and mapping, with real-time data transmission capabilities.
Key findings include:
- Effective shielding of electronic components, significantly reducing radiation exposure
- Successful integration of radiation detection, GPS tracking, and data visualization
- Demonstration of remote operation capabilities in simulated hazardous environments
This project has potential applications in nuclear power plant inspections, environmental radiation monitoring, and emergency response scenarios following nuclear incidents. The rover's shielding design effectively protects its electronic components from radiation damage, ensuring reliable operation in high-radiation environments.
Future Developments
Based on the research findings, future iterations of the rover could incorporate:
- Autonomous operation with object detection capabilities
- Integration of more sophisticated radiation detectors, including scintillation detectors for radioisotope identification
- Enhanced robotic arm with more advanced actuators for precise handling of radiation sources
- Improved shielding materials and designs for even better protection of electronic components
- Extended battery life for longer mission durations
- Integration of air sampling capabilities for comprehensive environmental monitoring
Acknowledgements
This project was funded by the Military Institute of Science and Technology (MIST), Dhaka, Bangladesh. We are grateful for their support in making this research possible.